
Luke Metcalfe
Line Follower
October 2018
Between July 2018 and October 2018, I worked in a group of 4 students to design and build an autonomous line-following robot. The brief required us to build a robot capable of following a black line on the ground and stopping exactly 10cm from a wall at the finish line. Marks were to be allocated according to the robot's time around the track, its ability to follow the line precisely, and its precision in the distance from the wall at the end of the track.

Sensors
Two types of sensors were designed for this robot:
-
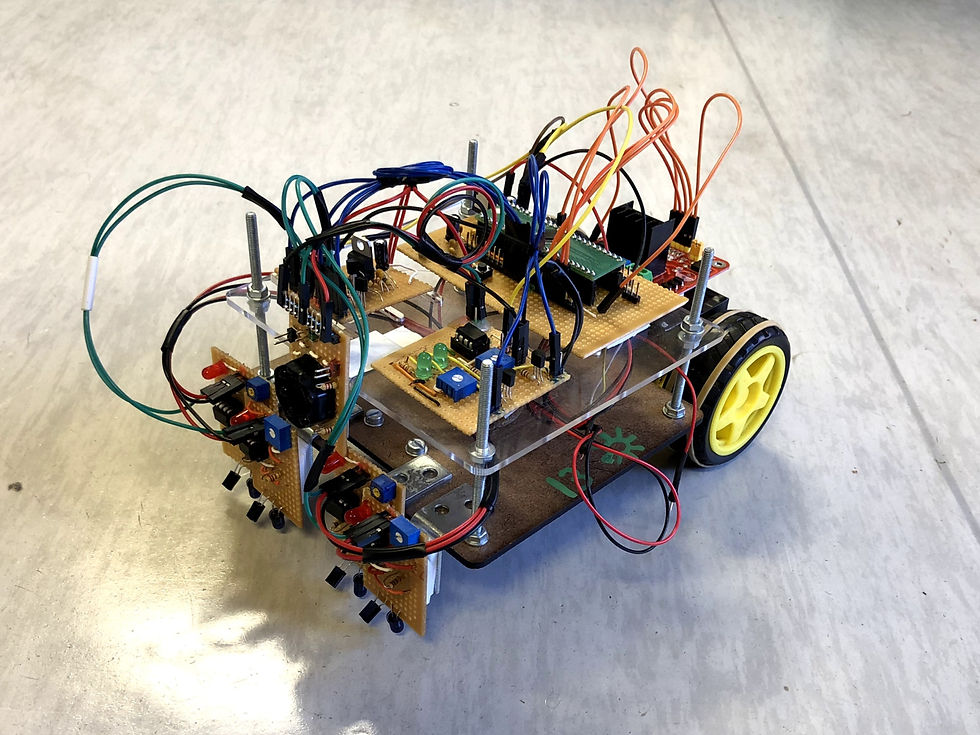
The distance sensor - the large black ring on the front - consists of eight infrared LEDs shining a large beam of infrared light forwards. As the robot approaches a wall, infrared light is reflected towards the robot, where it is received by a photodiode in the middle of the ring. The analogue voltage across the photodiode is proportional to the robot's distance from the wall, so can be used to determine the distance. The sensor can be calibrated to trigger at precisely 10cm.
-
Four line sensors were used to track the position of the line. These also used IR LED transmitters and a photodiode receiver. The black line absorbs light, while the lighter track reflects it. The sensor uses this property to produce an analogue voltage indicating the presence or absence of the line.

Performance
The robot required a lot of calibrating, but followed the line quite precisely. It was relatively fast, and stopped almost exactly 10cm from the wall. Unfortunately, we encountered issues on the day of the final demonstration, so the robot did not perform to the best of its abilities. The final demonstration is shown below: